 We invented the Tango, a new passive haptic interface for whole-hand interaction with 3D objects. Several versions were built by Pai and Vanderloo between 1999 and 2001, including a wireless one with bluetooth.
We invented the Tango, a new passive haptic interface for whole-hand interaction with 3D objects. Several versions were built by Pai and Vanderloo between 1999 and 2001, including a wireless one with bluetooth.
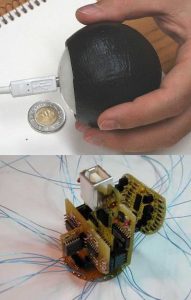
The Tango is shaped like a ball and can be grasped comfortably in one hand. Its pressure sensitive skin measures the contact pressures exerted by the user’s hand, and accelerometers within the device measure its motion and attitude. This information can be used for novel modes of interaction with three dimensional objects. We describe the design of the device, and the software for interpreting the sensor data for user interaction. We also developed new data-driven algorithms for recognizing grasps and for interacting with 3D objects using the Tango.
References
- P. G. Kry and D. K. Pai, “Grasp Recognition and Manipulation with the Tango,” International Symposium on Experimental Robotics, Rio de Janeiro, Brazil, July 6-10, 2006. 9 pages. [pdf]
- D. K. Pai, E. W. VanDerLoo, S. Sadhukhan, P. G. Kry, “The Tango: a tangible tangoreceptive whole-hand human interface,” in Proceedings of WorldHaptics (Joint Eurohaptics Conference and IEEE Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems), Pisa, Italy March 18-20, 2005. pp. 141-147. [DOI]