Measuring Contact with Real Human Bodies
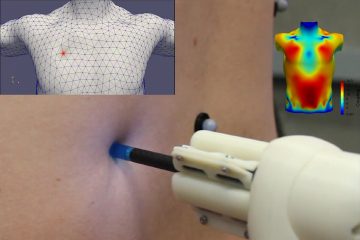
Simulating how the human body deforms in contact with clothing, wearables, and other objects is of central importance to many fields. However, the tissue material properties needed to accurately simulate real human bodies had been sorely lacking. We showed that these mechanical properties can be directly measured using a novel hand-held device. We have developed […]
Eulerian Solids
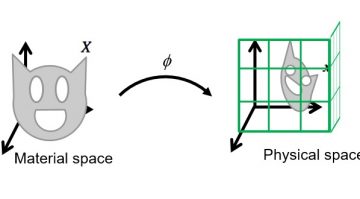
Soft tissues are usually simulated using the Finite Element Method (FEM), with the Lagrangian approach that is the standard in engineering. In this approach the simulation tracks the position of material points over time. In contrast, in an Eulerian approach the space in which the […]
Skin Simulation
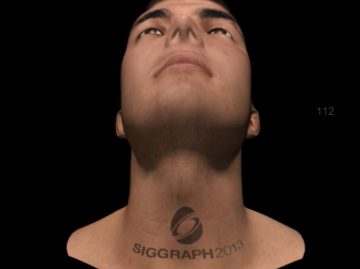
Simulating thin hyperelastic materials, such as human skin and skin-tight clothing, that move in close contact with the body is very difficult. We solve this problem by combining Eulerian discretization of skin on the body with the use of reduced coordinates. This enables simulation of skin sliding […]
GazeBot: a biologically motivated eye-head robot
The eye movement system of animals is an exemplary sensorimotor system, with a wealth of neurophysiological data. Many descriptive models have been developed to explain this data. To better understand the functional significance of the control architecture used in animals […]
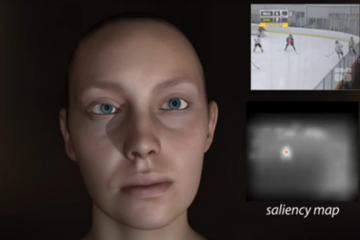
EyeMove: Measurement and Animation of the Eye Region with WebGL
We propose a system for real-time animation of eyes that can be interactively controlled in a WebGL enabled device using a small number of animation parameters, including gaze. These animation parameters can be obtained using traditional keyframed animation curves, measured from an actor’s performance using off-the-shelf eye tracking methods, or estimated from the scene observed […]
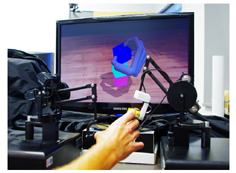
Hands On: a real-time adaptive animation interface with haptic feedback
Intuitively controlling the hand of a virtual character or a robot manipulator is difficult. We developed Hands On, a real-time, adaptive animation interface, driven by compliant contact and force information, for animating contact and precision manipulations of virtual objects. […]
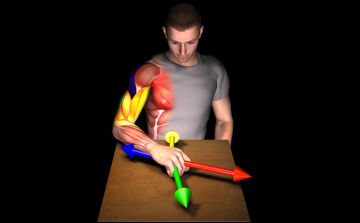
Synergies and Modularity in Human Sensorimotor Control
Human motor skills are remarkably complex because they require coordinating many muscles acting on many joints. A widely held, but controversial, hypothesis in neuroscience is that the nervous system simplifies learning and control using a modular architecture, based on modules called synergies. Previous evidence for modularity had been indirect, based on statistical regularities in the […]
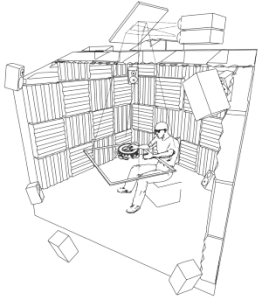
HAVEN: the Haptic Auditory and Visual ENvironment
The HAVEN was a facility for multisensory modeling and simulation, developed at Rutgers University by Prof. Pai to support multisensory human interaction in an immersive virtual environment. The HAVEN is a densely-sensed environment.[…]
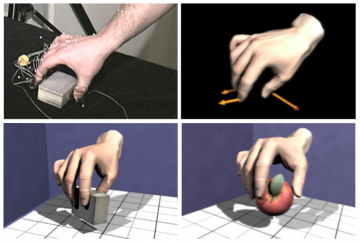
Interaction Capture and Synthesis
Controlling contact between the hand and physical objects is a major challenge for computer animation, virtual reality, and sensorimotor neuroscience. The compliance with which the hand makes contact also reveals important aspects of the movement’s purpose. We present a […]

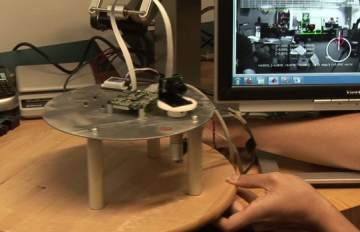
The Tango: a tangible tangoreceptive whole-hand human interface
We invented the Tango, a new passive haptic interface for whole-hand interaction with 3D objects. Several versions were built by Pai and Vanderloo between 1999 and 2001, including a wireless one with bluetooth. The Tango is shaped like a ball and can be grasped comfortably in one hand. Its pressure sensitive skin measures the contact […]