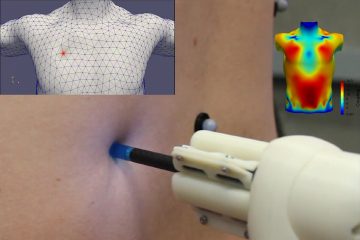
Measuring Contact with Real Human Bodies
Simulating how the human body deforms in contact with clothing, wearables, and other objects is of central importance to many fields. However, the tissue material properties needed to accurately simulate real human bodies had been sorely lacking. We showed that these mechanical properties can be directly measured using a novel hand-held device. We have developed […]
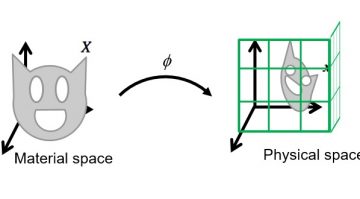
Eulerian Solids
Soft tissues are usually simulated using the Finite Element Method (FEM), with the Lagrangian approach that is the standard in engineering. In this approach the simulation tracks the position of material points over time. In contrast, in an Eulerian approach the space in which the […]
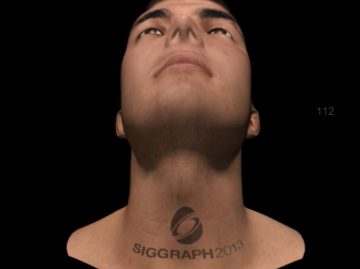
Skin Simulation
Simulating thin hyperelastic materials, such as human skin and skin-tight clothing, that move in close contact with the body is very difficult. We solve this problem by combining Eulerian discretization of skin on the body with the use of reduced coordinates. This enables simulation of skin sliding […]
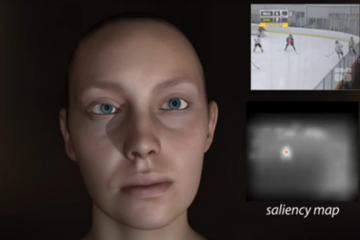
EyeMove: Measurement and Animation of the Eye Region with WebGL
We propose a system for real-time animation of eyes that can be interactively controlled in a WebGL enabled device using a small number of animation parameters, including gaze. These animation parameters can be obtained using traditional keyframed animation curves, measured from an actor’s performance using off-the-shelf eye tracking methods, or estimated from the scene observed […]
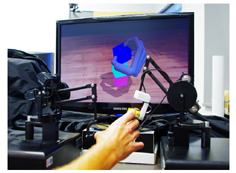
Hands On: a real-time adaptive animation interface with haptic feedback
Intuitively controlling the hand of a virtual character or a robot manipulator is difficult. We developed Hands On, a real-time, adaptive animation interface, driven by compliant contact and force information, for animating contact and precision manipulations of virtual objects. […]
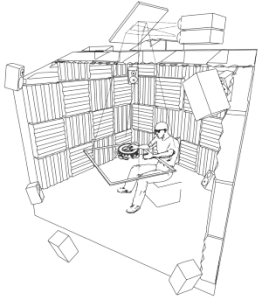
HAVEN: the Haptic Auditory and Visual ENvironment
The HAVEN was a facility for multisensory modeling and simulation, developed at Rutgers University by Prof. Pai to support multisensory human interaction in an immersive virtual environment. The HAVEN is a densely-sensed environment.[…]
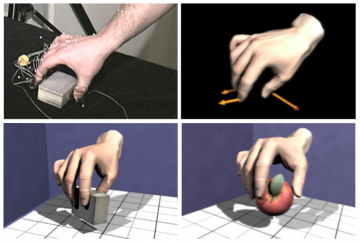
Interaction Capture and Synthesis
Controlling contact between the hand and physical objects is a major challenge for computer animation, virtual reality, and sensorimotor neuroscience. The compliance with which the hand makes contact also reveals important aspects of the movement’s purpose. We present a […]

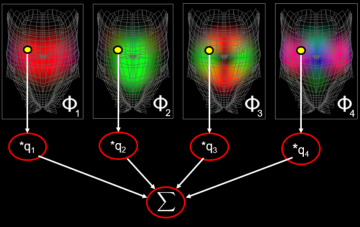
EigenSkin: Real-time Soft Articulated Body Skinning
We developed a technique, called EigenSkin, for real-time quasi-static deformation of articulated soft bodies such as human and robot hands. The deformations are compactly approximated by data-dependent eigenbases which are optimized for real time rendering with vertex programs on commodity graphics hardware. Animation results are presented for a very large nonlinear finite element model of […]
Real-time Soft Body Dynamics and Contact with GPUs
A long standing challenge had been fast simulation of realistic soft body dynamics, a computationally expensive task. In 2002, when the programmable graphics processor (GPU) was first introduced, we showed how precomputed modal deformation models could be efficiently mapped onto such massively parallel architectures with negligible main CPU costs. The precomputation is stored as a […]
ArtDefo: Real Time Elastostatics using Boundary Elements (BEM) and Precomputed Green’s functions
We developed a general framework for low-latency simulation of large linear elastostatic deformable models, suitable for real time animation and haptic interaction in virtual environments. The deformation is described using precomputed Green’s functions, and runtime boundary value problems are solved using Capacitance Matrix Algorithms. We introduced boundary element (BEM) techniques for precomputing Green’s functions, and […]