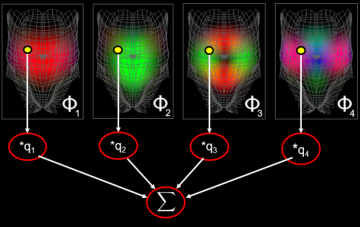
 A long standing challenge had been fast simulation of realistic soft body dynamics, a computationally expensive task. In 2002, when the programmable graphics processor (GPU) was first introduced, we showed how precomputed modal deformation models could be efficiently mapped onto such massively parallel architectures with negligible main CPU costs. The precomputation is stored as a Dynamic Response Texture, or DyRT, that can be mapped onto any conventional animation as an optional rendering stage using commodity graphics hardware (our implementation sampled this per vertex). Precomputed modes are excited by skeletal motions. This allowed, for the first time, simulation of geometrically complex, physically-based, volumetric, dynamic deformation models in real time, even on commodity graphics hardware, ca. 2002.
A long standing challenge had been fast simulation of realistic soft body dynamics, a computationally expensive task. In 2002, when the programmable graphics processor (GPU) was first introduced, we showed how precomputed modal deformation models could be efficiently mapped onto such massively parallel architectures with negligible main CPU costs. The precomputation is stored as a Dynamic Response Texture, or DyRT, that can be mapped onto any conventional animation as an optional rendering stage using commodity graphics hardware (our implementation sampled this per vertex). Precomputed modes are excited by skeletal motions. This allowed, for the first time, simulation of geometrically complex, physically-based, volumetric, dynamic deformation models in real time, even on commodity graphics hardware, ca. 2002.
We also developed an efficient output-sensitive collision data structure called BD-Tree (Bounded Deformation Tree) for fast collision detection with such reduced deformable models. This enables collision detection of large numbers of dynamically deforming soft objects.
References
- D. L. James and D. K. Pai, “BD-Tree: Output-Sensitive Collision Detection for Reduced Deformable Models” in Proceedings of ACM SIGGRAPH 2004, Aug 2004. [pdf, 4.8M], [video]
- D. L. James and D. K. Pai, “DyRT: Dynamic Response Textures for Real Time Deformation Simulation with Graphics Hardware,” in Proceedings of ACM SIGGRAPH 2002, San Antonio, Texas, July 2002. [pdf, 2.2M], [video-jump], [video-surgical]