Real-time Soft Body Dynamics and Contact with GPUs
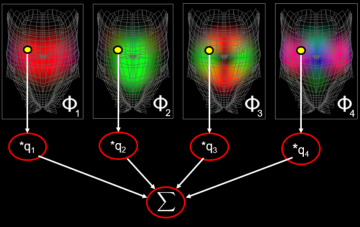
A long standing challenge had been fast simulation of realistic soft body dynamics, a computationally expensive task. In 2002, when the programmable graphics processor (GPU) was first introduced, we showed how precomputed modal deformation models could be efficiently mapped onto such massively parallel architectures with negligible main CPU costs. The precomputation is stored as a […]