
EigenSkin: Real-time Soft Articulated Body Skinning
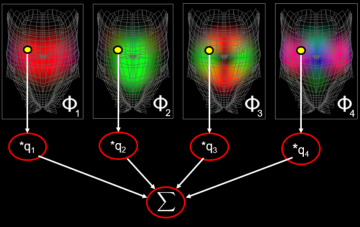
We developed a technique, called EigenSkin, for real-time quasi-static deformation of articulated soft bodies such as human and robot hands. The deformations are compactly approximated by data-dependent eigenbases which are optimized for real time rendering with vertex programs on commodity graphics hardware. Animation results are presented for a very large nonlinear finite element model of […]
Real-time Soft Body Dynamics and Contact with GPUs
A long standing challenge had been fast simulation of realistic soft body dynamics, a computationally expensive task. In 2002, when the programmable graphics processor (GPU) was first introduced, we showed how precomputed modal deformation models could be efficiently mapped onto such massively parallel architectures with negligible main CPU costs. The precomputation is stored as a […]