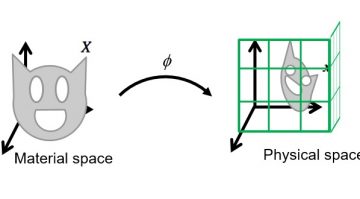
Eulerian Solids
Soft tissues are usually simulated using the Finite Element Method (FEM), with the Lagrangian approach that is the standard in engineering. In this approach the simulation tracks the position of material points over time. In contrast, in an Eulerian approach the space in which the […]
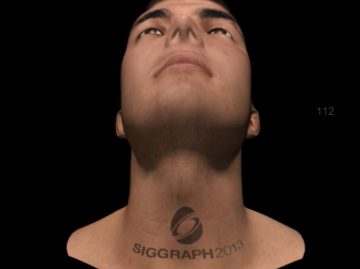
Skin Simulation
Simulating thin hyperelastic materials, such as human skin and skin-tight clothing, that move in close contact with the body is very difficult. We solve this problem by combining Eulerian discretization of skin on the body with the use of reduced coordinates. This enables simulation of skin sliding […]

Dinesh K. Pai
Dinesh K. Pai is a Professor and Tier 1 Canada Research Chair in the Department of Computer Science at the University of British Columbia, where he directs the Sensorimotor Systems Laboratory.

Trainees
We take great pride in mentoring and training students in research. Our trainees, at all levels, have been exceptionally successful, both in academia and industry. Fourteen of our trainees now hold faculty positions at some of the best universities in the world.

Research
The lab’s current research is focused on understanding the principles used by the brain and the musculoskeletal system to control and sense movement.
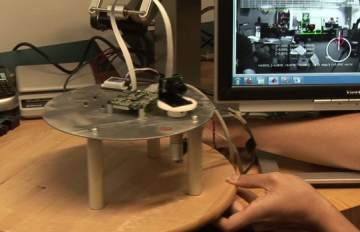
GazeBot: a biologically motivated eye-head robot
The eye movement system of animals is an exemplary sensorimotor system, with a wealth of neurophysiological data. Many descriptive models have been developed to explain this data. To better understand the functional significance of the control architecture used in animals […]
