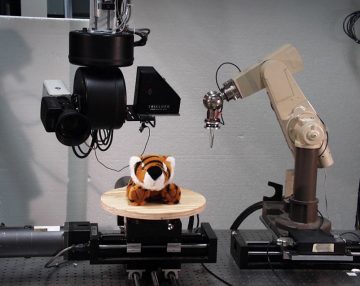
 Starting around 1998, we developed the UBC ACtive MEasurement facility (ACME), a telerobotic system for capturing comprehensive computer models of physical interaction behavior of real 3D objects. The behaviors we could successfully scan and model include deformation response, contact textures for interaction with force-feedback, and contact sounds. We also developed a novel software architecture for telerobotic control. ACME could acquire models of soft deformable objects, like a stuffed toy tiger, as well as models of hard objects, like a clay pot, which have significant contact textures and sounds. This influential system showed that it is possible to automatically acquire models for multisensory interaction with virtual objects, with visual, haptic, and auditory feedback, for applications in games, animation, and e-commerce.
Starting around 1998, we developed the UBC ACtive MEasurement facility (ACME), a telerobotic system for capturing comprehensive computer models of physical interaction behavior of real 3D objects. The behaviors we could successfully scan and model include deformation response, contact textures for interaction with force-feedback, and contact sounds. We also developed a novel software architecture for telerobotic control. ACME could acquire models of soft deformable objects, like a stuffed toy tiger, as well as models of hard objects, like a clay pot, which have significant contact textures and sounds. This influential system showed that it is possible to automatically acquire models for multisensory interaction with virtual objects, with visual, haptic, and auditory feedback, for applications in games, animation, and e-commerce.
References
- D. K. Pai, K. van den Doel, D. L. James, J. Lang, J. E. Lloyd, J. L. Richmond, S. H. Yau, “Scanning Physical Interaction Behavior of 3D Objects,” in Computer Graphics (ACM SIGGRAPH 2001 Conference Proceedings), August 2001. [pdf 1.5M], [mpg 16M]
More details are available in the following papers:
- J. Lang, D. K. Pai and H-P. Seidel, “Scanning Large-Scale Articulated Deformations,” in proceedings of Graphics Interface, Halifax, June 2003. [pdf 2.4M].
- J. E. Lloyd and D. K. Pai, “Robotic Mapping of Friction and Roughness for Reality-based Modeling,” in Proceedings of the 2001 IEEE International Conference on Robotics and Automation. pp. 1884-1890. [DOI]
- J. L. Richmond and D. K. Pai, “Active Measurement and Modeling of Contact Sounds,” in Proceedings of the 2000 IEEE International Conference on Robotics and Automation, San Francisco, April 2000, pp. 2146-2152. [DOI]
- J. Lang and D. K. Pai, “Bayesian Estimation of Distance and Surface Normal with a Time-of-Flight Laser Rangefinder,” in proceedings of the Second International Conference on 3-D Digital Imaging and Modeling (IEEE), Ottawa, pp. 109-117, October, 1999. [pdf]
- D. K. Pai, J. Lang, J. E. Lloyd, and R. J. Woodham. “ACME, A Telerobotic Active Measurement Facility.” in Proceedings of the Sixth International Symposium on Experimental Robotics, Sydney, Australia, March 1999. Also appears in Experimental Robotics VI. Springer London, 2000. 391-400. [DOI]
- D. K. Pai, “Robotics in Reality-based Modeling,” in proceedings of the International Symposium on Robotics Research, Snowbird, UT, October 8-12, 1999. Also appears in Robotics Research: the Ninth International Symposium, Springer-Verlag. pp. 353-358, 2000. [DOI]