GazeBot: a biologically motivated eye-head robot
The eye movement system of animals is an exemplary sensorimotor system, with a wealth of neurophysiological data. Many descriptive models have been developed to explain this data. To better understand the functional significance of the control architecture used in animals […]

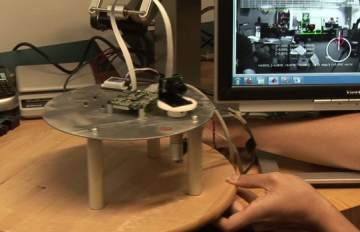
The Tango: a tangible tangoreceptive whole-hand human interface
We invented the Tango, a new passive haptic interface for whole-hand interaction with 3D objects. Several versions were built by Pai and Vanderloo between 1999 and 2001, including a wireless one with bluetooth. The Tango is shaped like a ball and can be grasped comfortably in one hand. Its pressure sensitive skin measures the contact […]

EigenSkin: Real-time Soft Articulated Body Skinning
We developed a technique, called EigenSkin, for real-time quasi-static deformation of articulated soft bodies such as human and robot hands. The deformations are compactly approximated by data-dependent eigenbases which are optimized for real time rendering with vertex programs on commodity graphics hardware. Animation results are presented for a very large nonlinear finite element model of […]
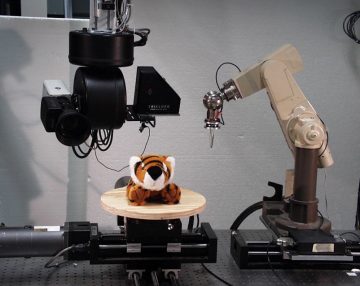
ACME: Scanning Physical Interaction Behavior of 3D Objects
Starting around 1998, we developed the UBC ACtive MEasurement facility (ACME), a telerobotic system for capturing comprehensive computer models of physical interaction behavior of real 3D objects. The behaviors we could successfully scan and model include deformation response, contact textures for interaction with force-feedback, and contact sounds. We also developed a novel software architecture for […]